
| Po zkušenostech s KAP
soupravou I. musel zákonitì
pøijít upgrade na vyšší
verzi. Poadavky
jsem mìl tyto. Dálkovì ovládané
naklápìní foáku nahoru, dolù a rotace
kolem
svislé osy. Dálkovì
ovládaná spouš
foáku. Také byla nutná
zpìtná vazba. Tedy
vidìt to, co vidí foák.
Øešení je CCD
kamera s AV vysílaèem. Také
dálkové
zapínání a
vypínání kamery a
AV vysílaèe z dùvodu velké spotøeby energie.
Bohuel jsem
nìjak zapomnìl na hmotnost. e by teda nìjaká trojka? No
uvidíme. Dlouho jsem se rozhodoval, jaký pouít vhodný zobrazovaè videa z CCD kamery. Rùzné LCD displeje jsem nakonec zavrhl a rozhodl se pouít notebook. A kdy u budu sledovat video na poèítaèi, proè to neovládat z poèítaèe celé, ne? To jsem si teda dal. Ale nakonec se to nìjak povedlo. Souprava se skládá ze dvou hlavních èástí. První èást je pozemní stanice dálkového ovládání øízená poèítaèem. Druhá èást je zavìšení fotoaparátu s øízením a mechanismy. 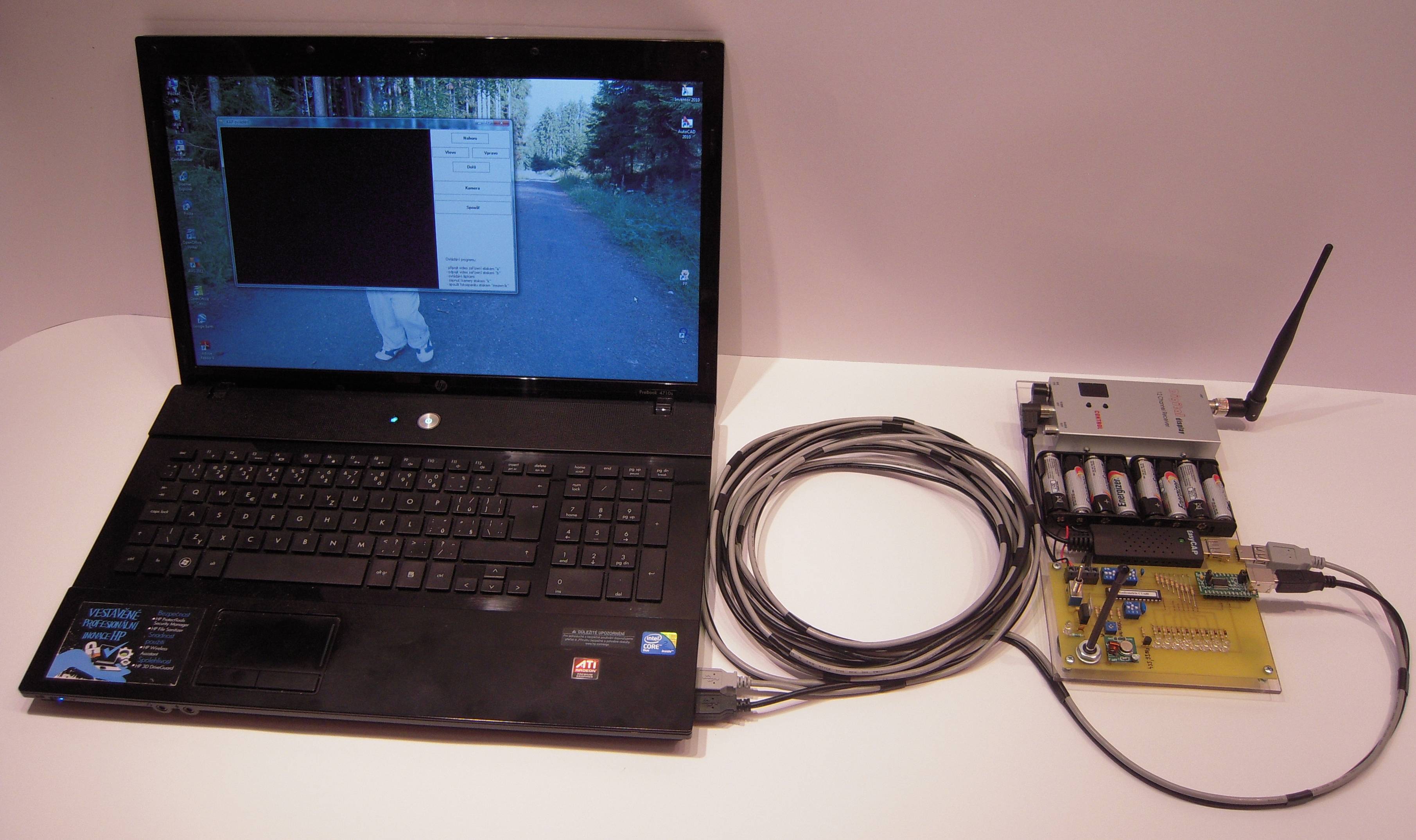
Pozemní stanice 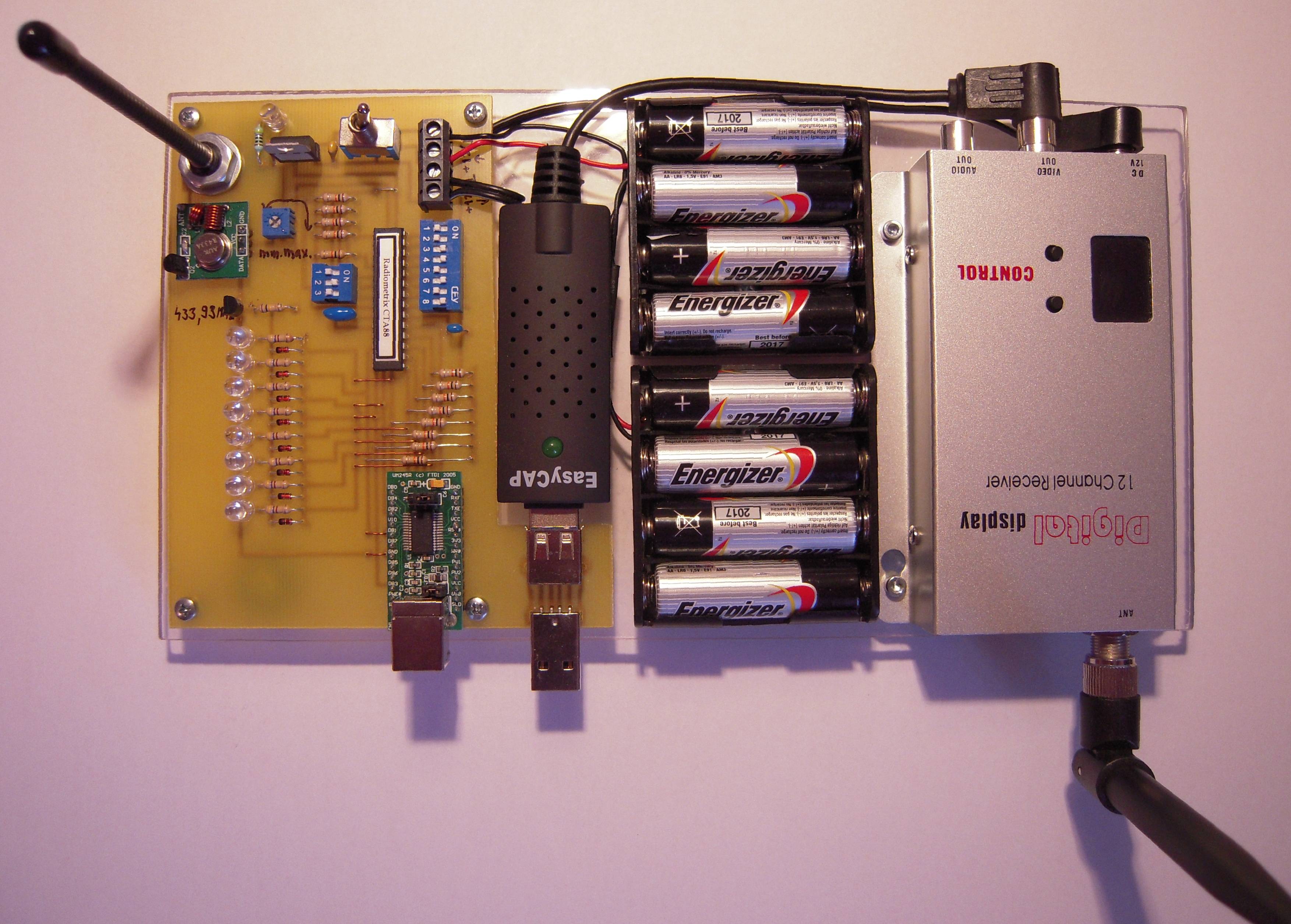
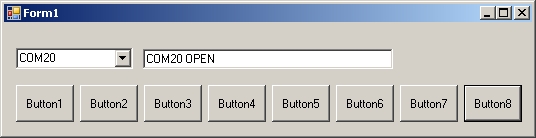
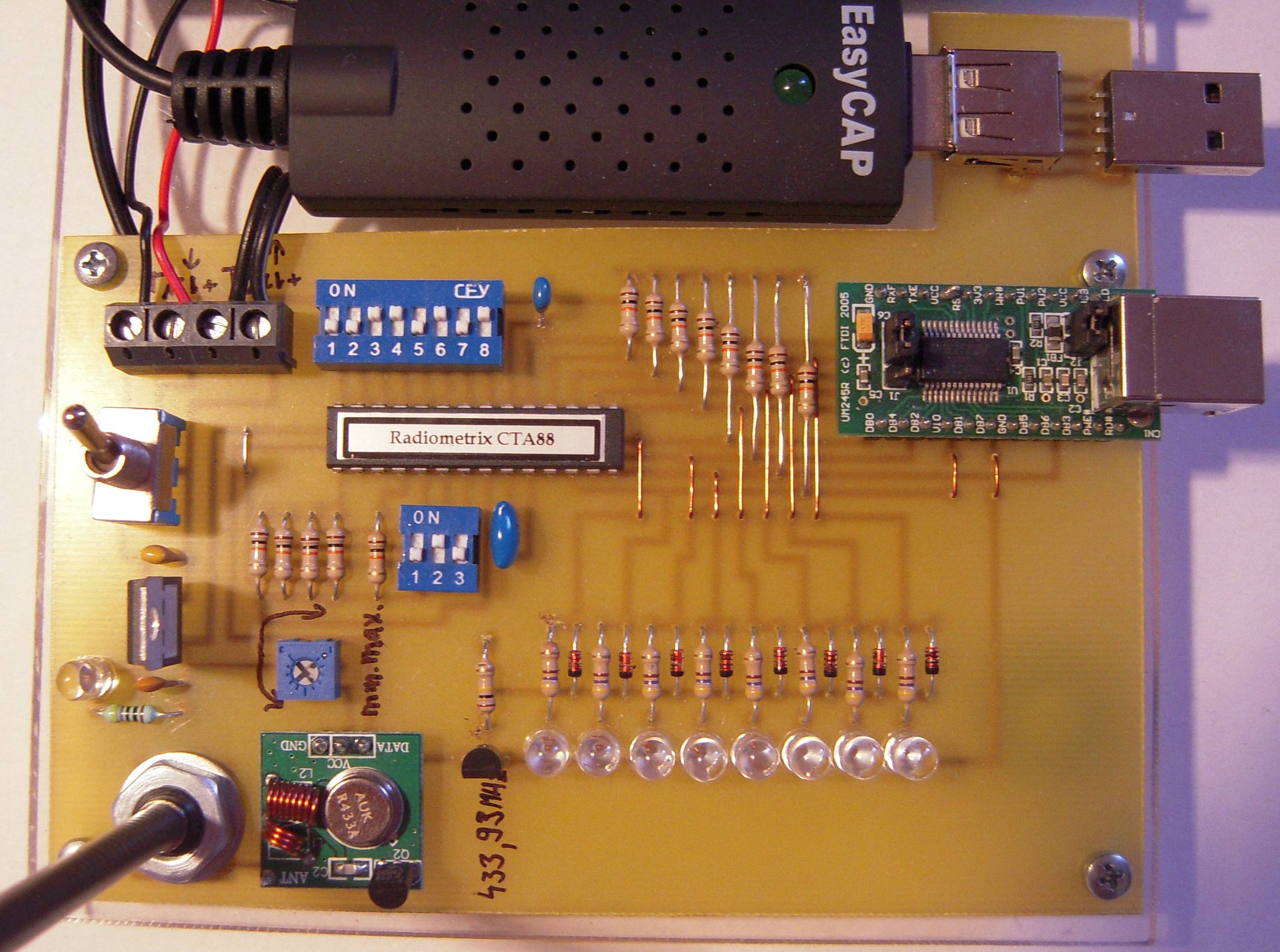
První, co jsem øešil byl výstup z poèítaèe. Potøeboval jsem 6 bitù (nahoru, dolù, vlevo, vpravo, spouš, kamera on/off). Nemám na notebooku seriový, nato paralelní port. Jen USBèka. To byl pro lamu, jako jsem já pìknej prùser. Nastoupil mùj kámoš Google a za pár dní bylo rozhodnuto. Pouil jsem modul UM245R od FTDI. Je to pøevodník z USB rozhraní na paralelní 8 bitové rozhraní. Na zkušební desku jsem osadil modul, rezistory a diody a zaèal laborovat se softwarem. Nejdøív jsem hledal nìjaký hotový program. Osvìdèil se mì USB 8 Relay Manager z www.denkovi.com. Funguje naprosto spolehlivì na XP aji ve win 7. Pak jsem teda zkoušel vytvoøit nìjaký vlastní program. Program je dìlaný ve Visual Basicu 2008. Podotýkám, e nejsem programátor, take to pro mì nebylo vùbec lehké. Nìkolik týdnù jsem gùgloval, ale nakonec se ovoce urodilo. Toto je
mùj testovací program pro
ovládání výstupù z modulu
UM245R
Pár lidí u mì kontaktovalo, jestli bych poskytnul zdrojový kód tohoto programu. Ten z videa u neexistuje, ale udìlal jsem podobný. UM245R controller. Ten si mùete stáhnout
UM245R controller
Finální verze programu vypadá takto. 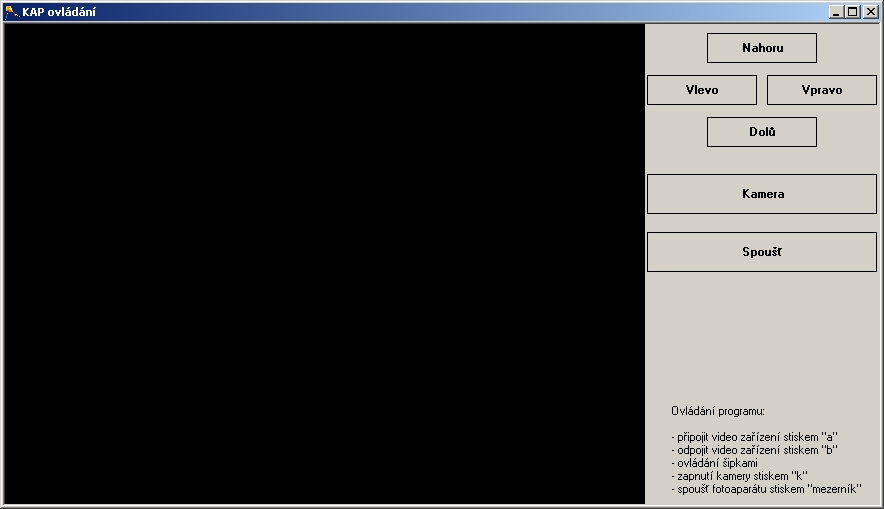
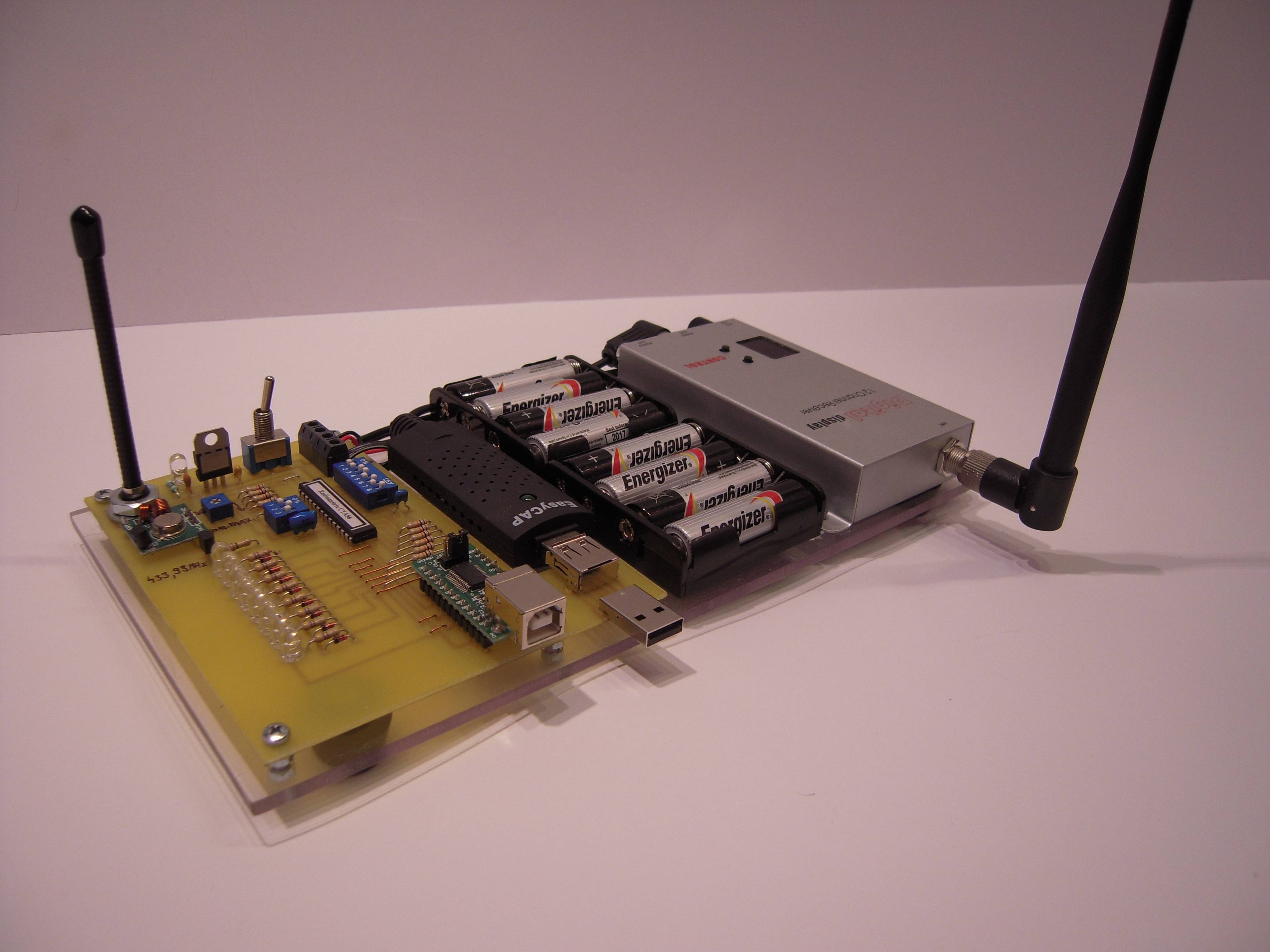
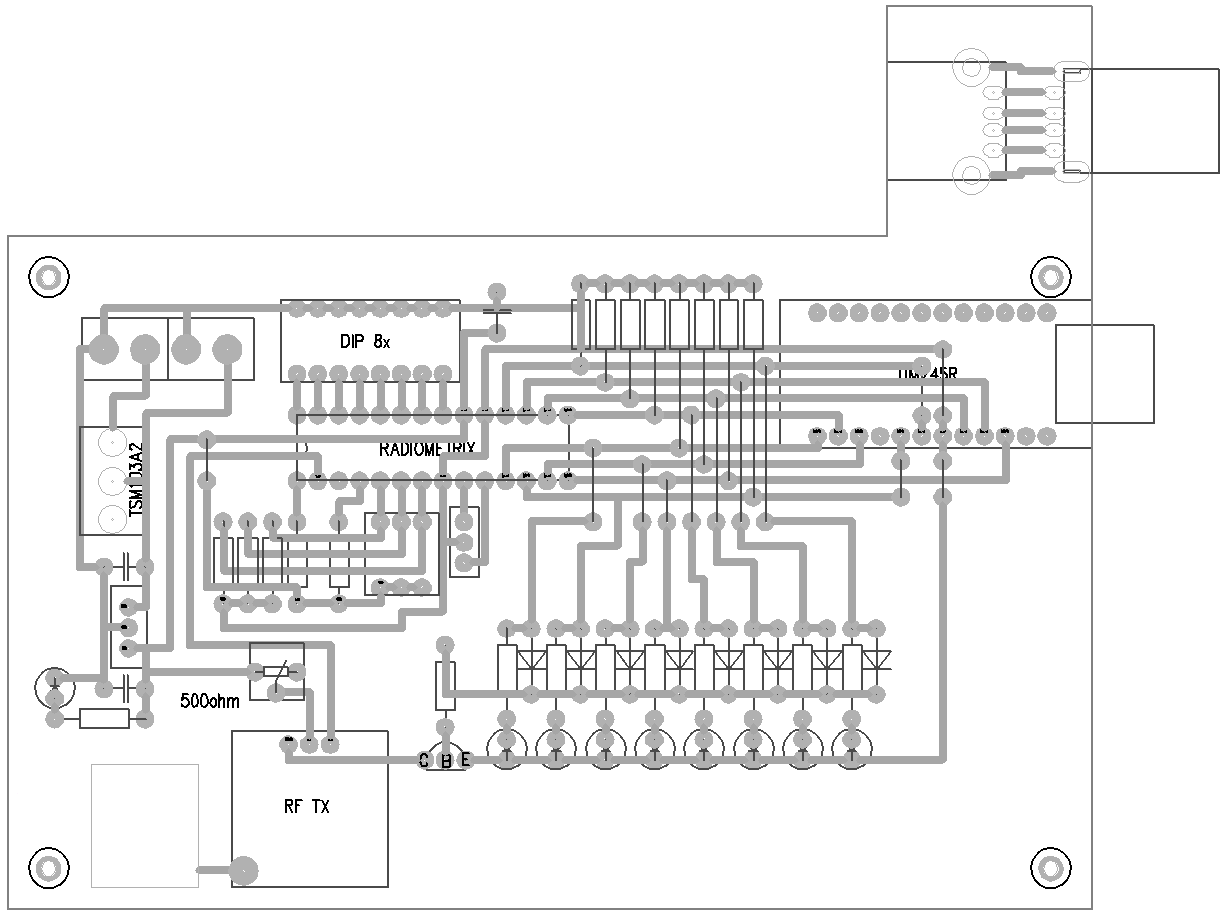
Teï u zbývalo jen poslat tyto bity do vzduchu. Výstupy z USB modulu jsou pøipojeny do 8 bitového kodéru. Kodér je pouitý obvod CTA88 od firmy Radiometrix, koupený v ART-Brno. Výstup z kodéru je pøipojený na vstup RF vysílaèe. Vysílaè jsem nekoupil nikde jinde ne na eBay. Najdete ho pod názvem "1000m RF Wireless Radio Transmitting Module TM1000-1" Aji s dopravou stál asi 130,- kè Kompletní schéma zapojení nemám. Ani není potøeba. Staèí zapojit obvody podle datalistù výrobcù a výstupy pøipojit ke vstupùm a je to. Jenom takový bonus navíc je spínání napájení RF vysílaèe tranzistorem pøes osmici diod pøipojených k výstupùm z USB modulu. To proto, aby vysílaè vysílal jenom pøi nìkteré log1. Pokud je na výstupech všude log0, vysílaè nevysílá. Návrh DPS jsem dìlal v AutoCADu. Sice jsem zkoušel nìco málo v Eaglu, ale nejsem s ním moc kamarád. Jestli by vám staèilo DWGèko z ACADu, tady je  . .
Rozmístìní souèástek
vysílaèe
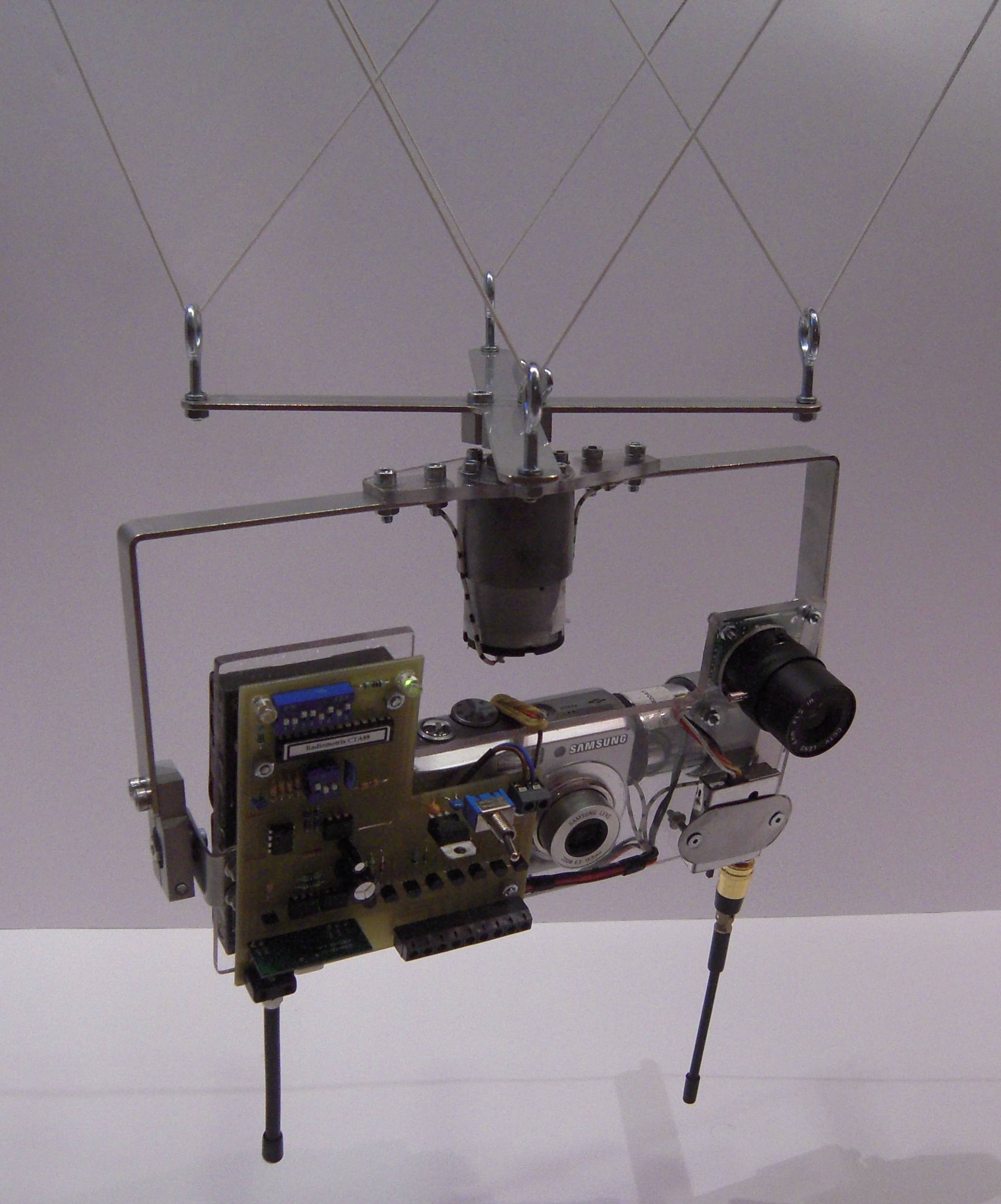
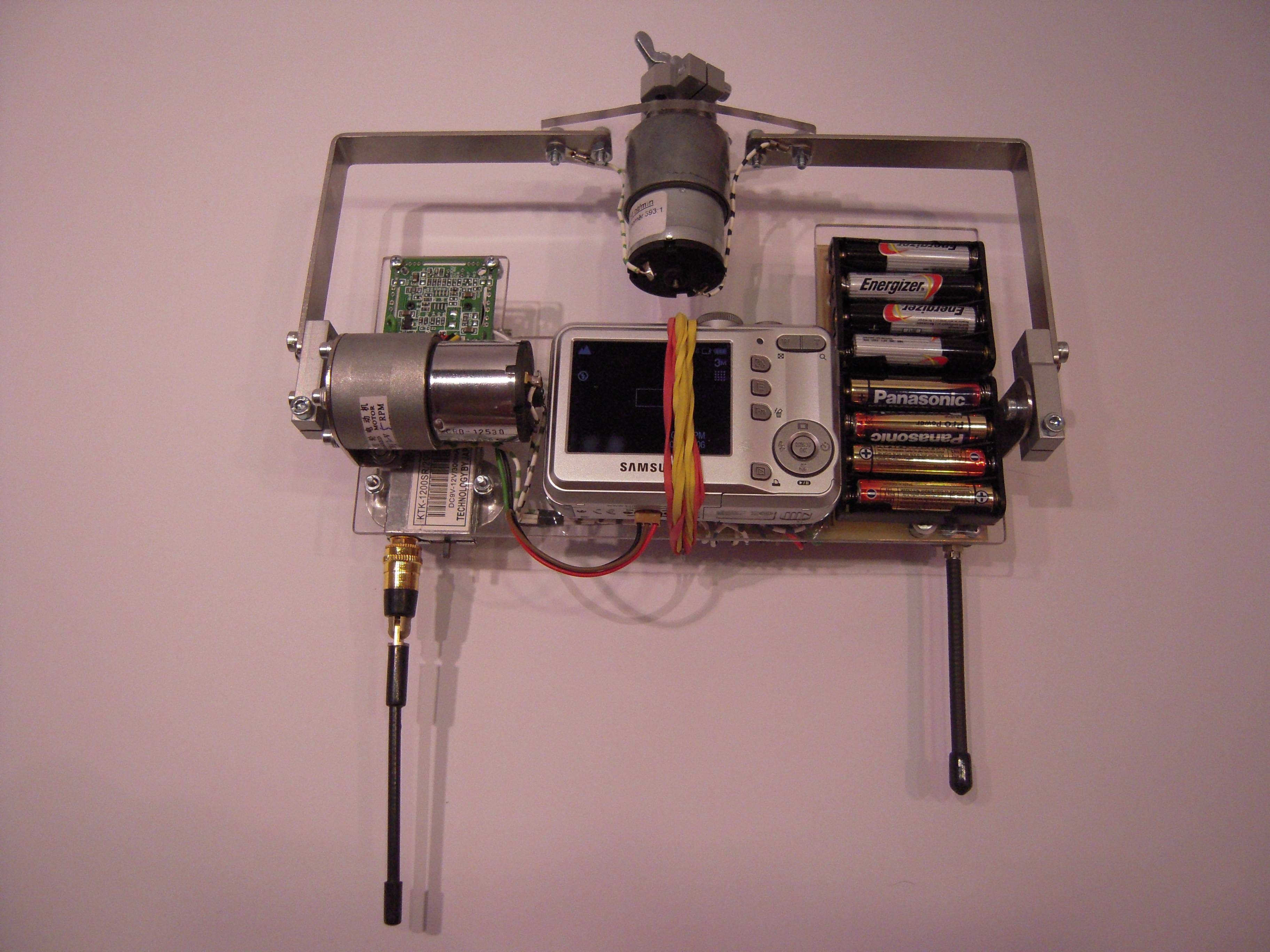
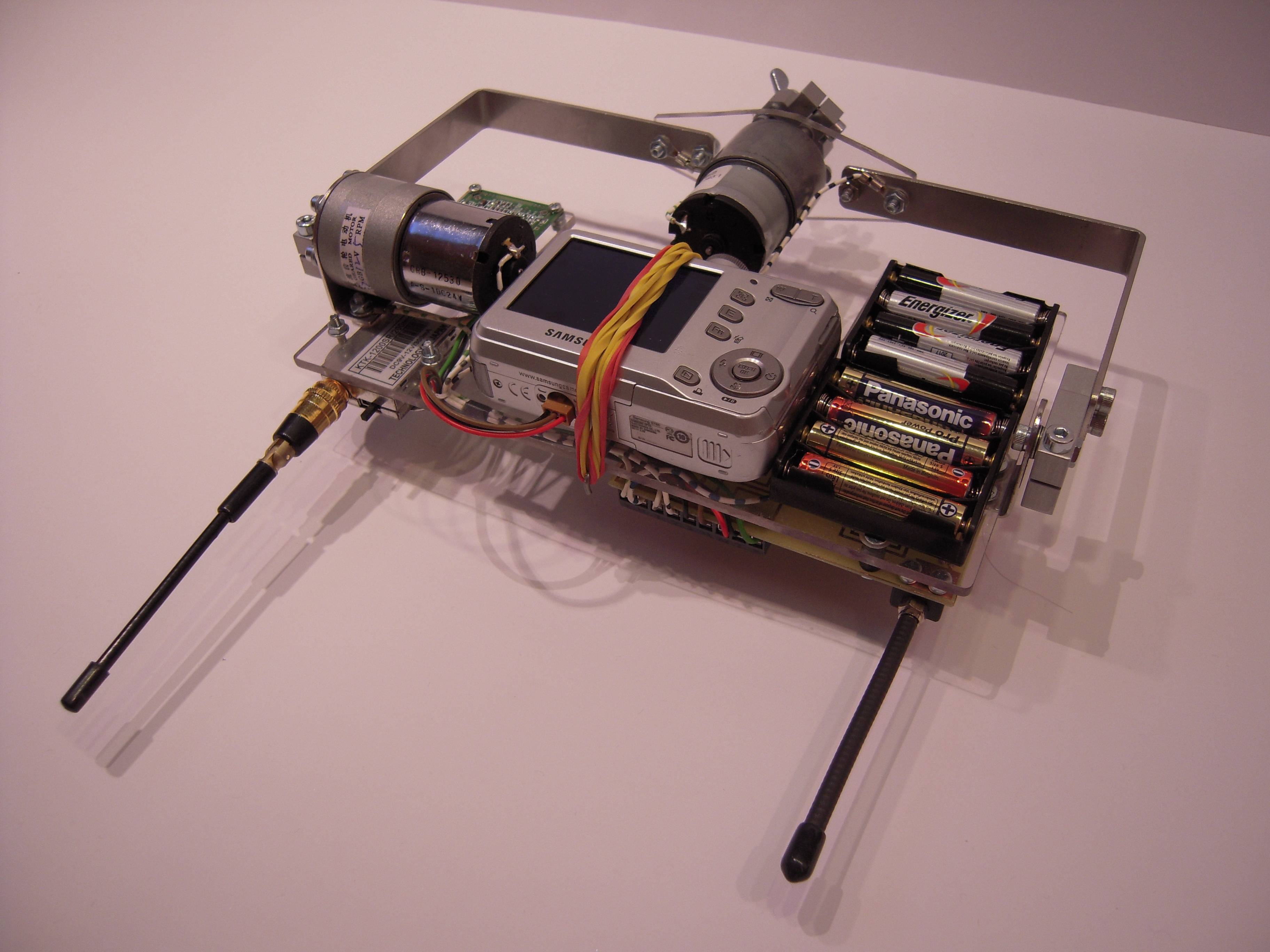
Zavìšení fotoaparátu
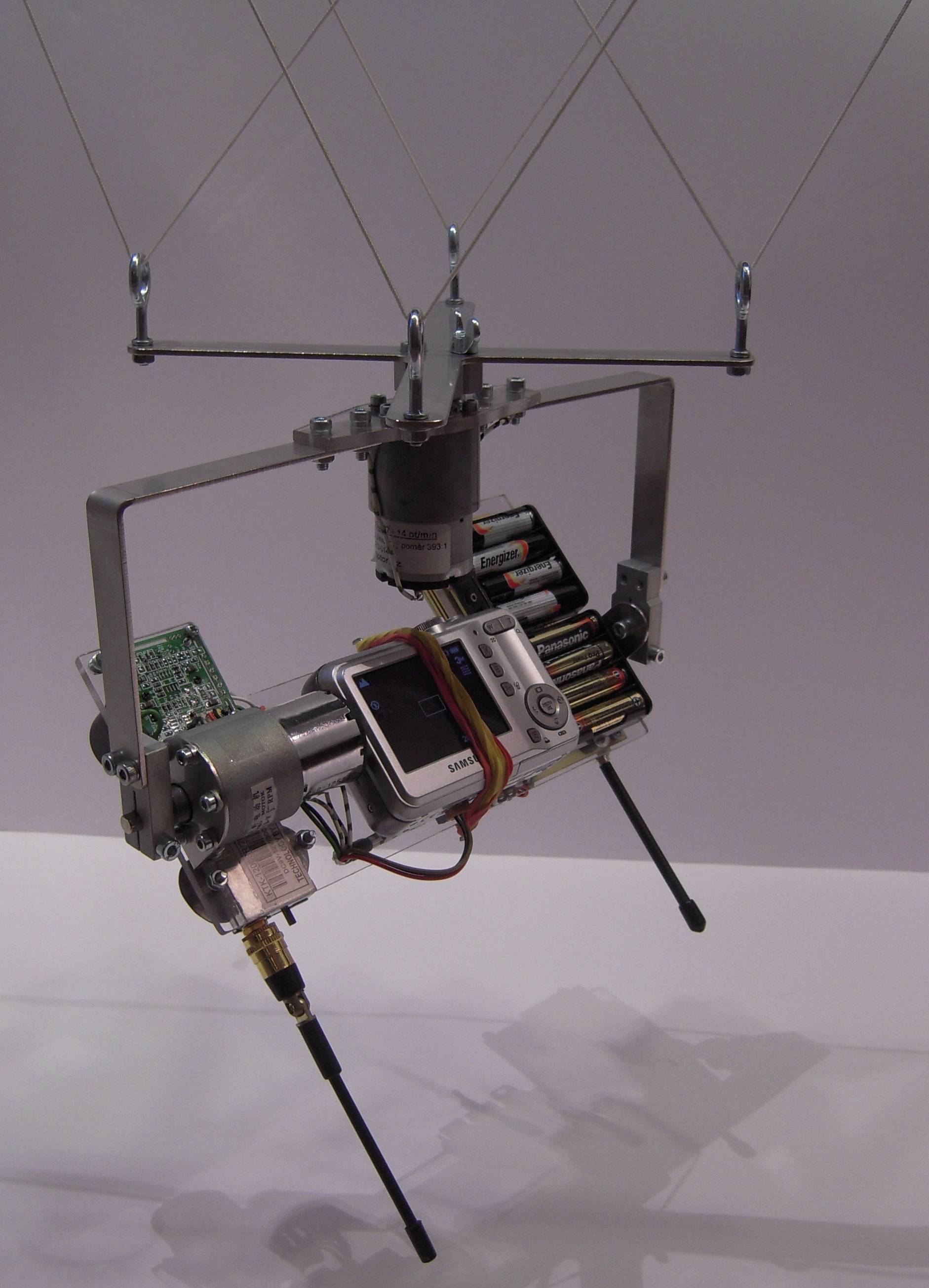 Nosná èást zavìšení je opìt Picavetùk køí, stejnì jako u jednièky. Obsahuje upravený fotoaparát, CCD kameru, vysílaè video signálu, 2 motory s pøevodovkou, pøijímaè dálkového ovládání s øídící elektronikou. Kamera je opìt èína z eBaye. Vysílaè video signálu jsem pouil z kompletu 1,2GHz 500mW Wireless AV Camera Transmitter/Receiver viz výše. Motory je moné koupit v snailinstruments nebo na eBay za polovièní cenu. Elektroniku trocho popíšu. 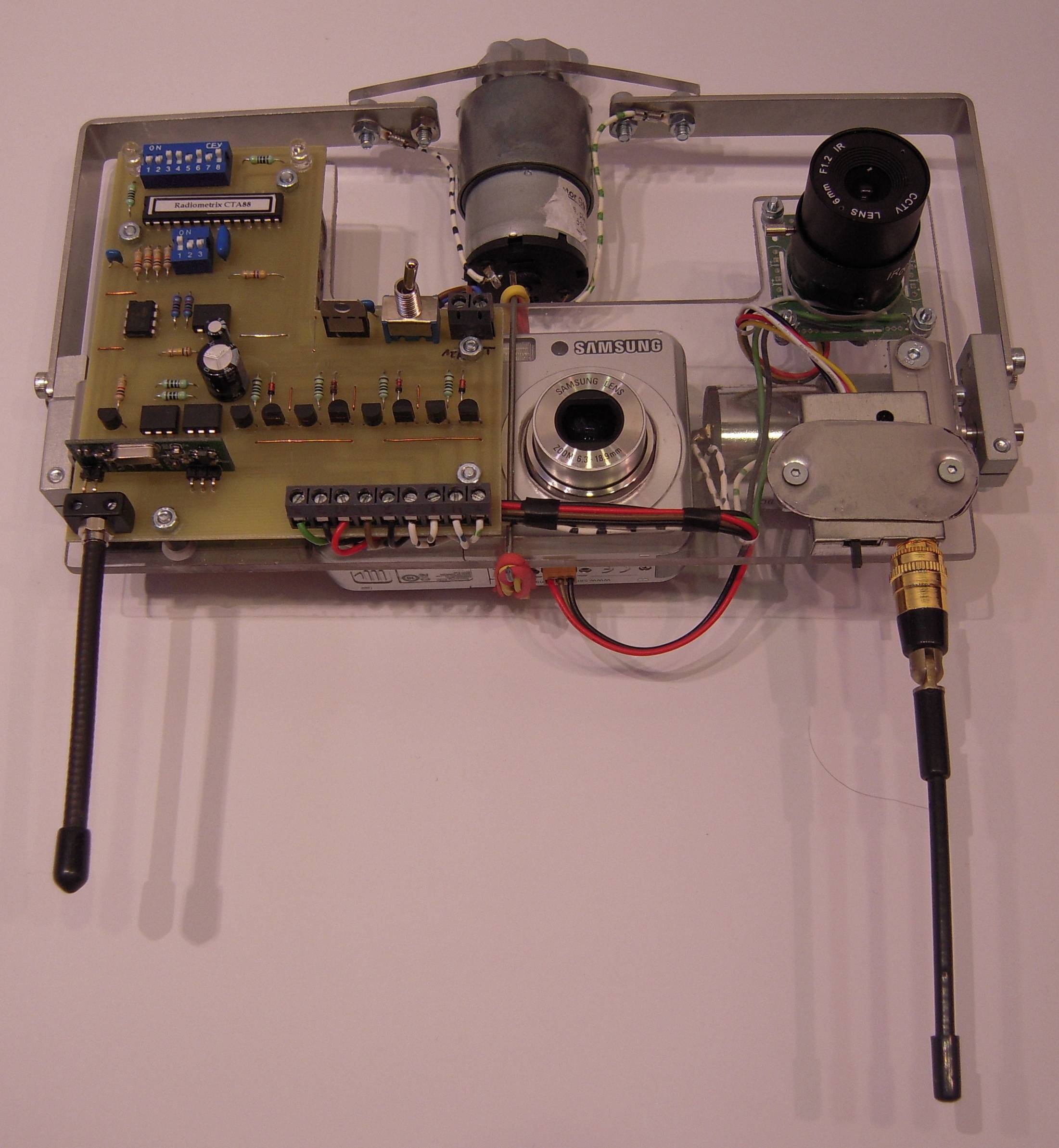 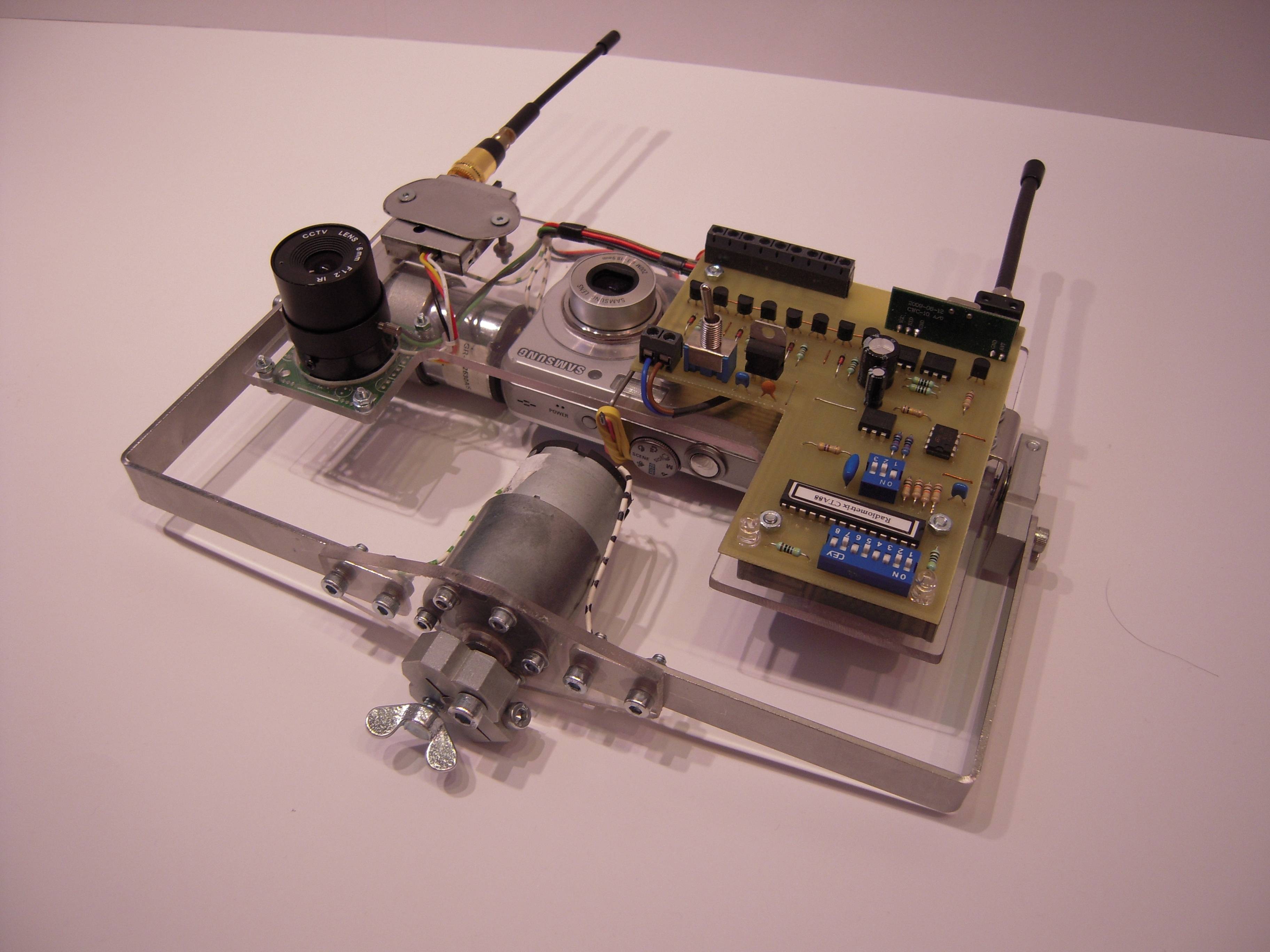
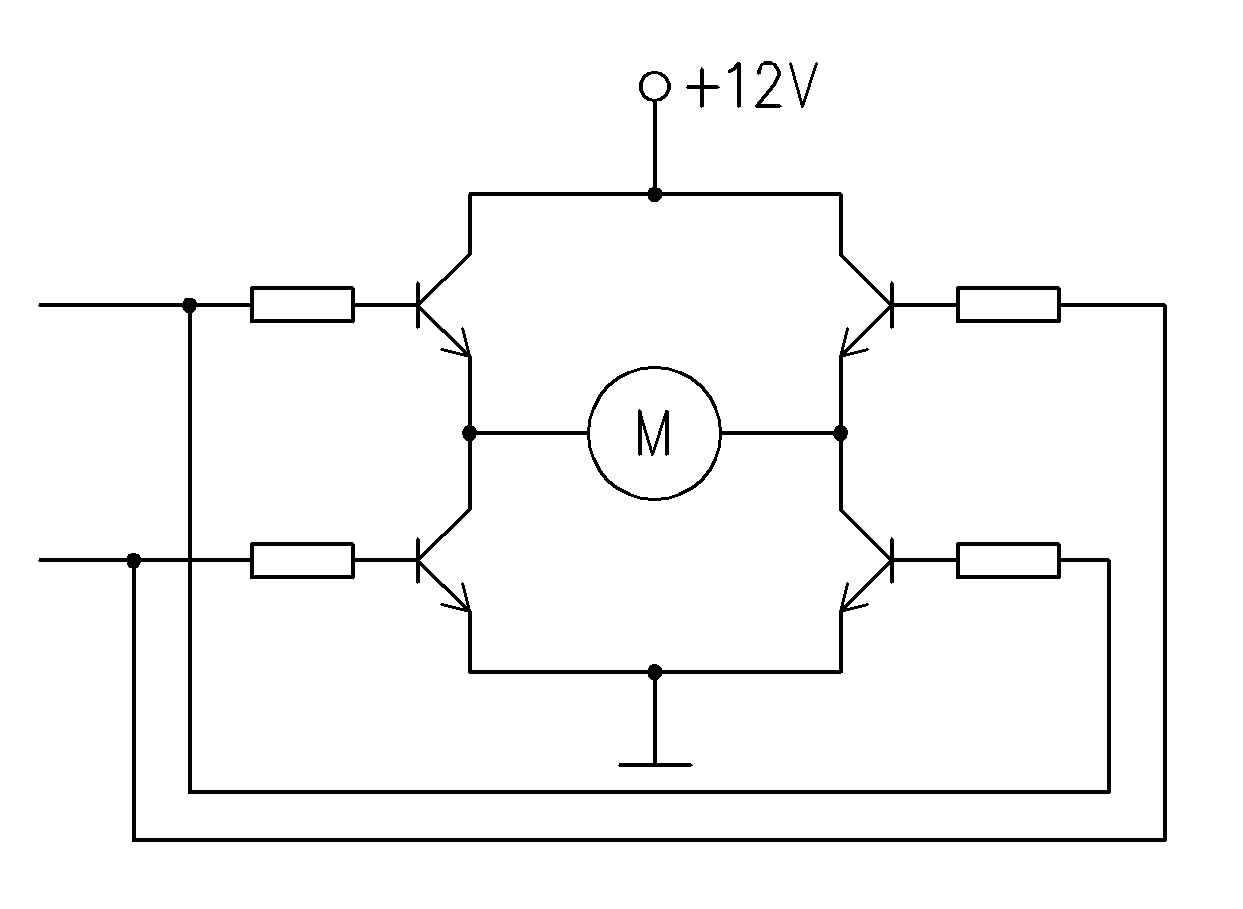
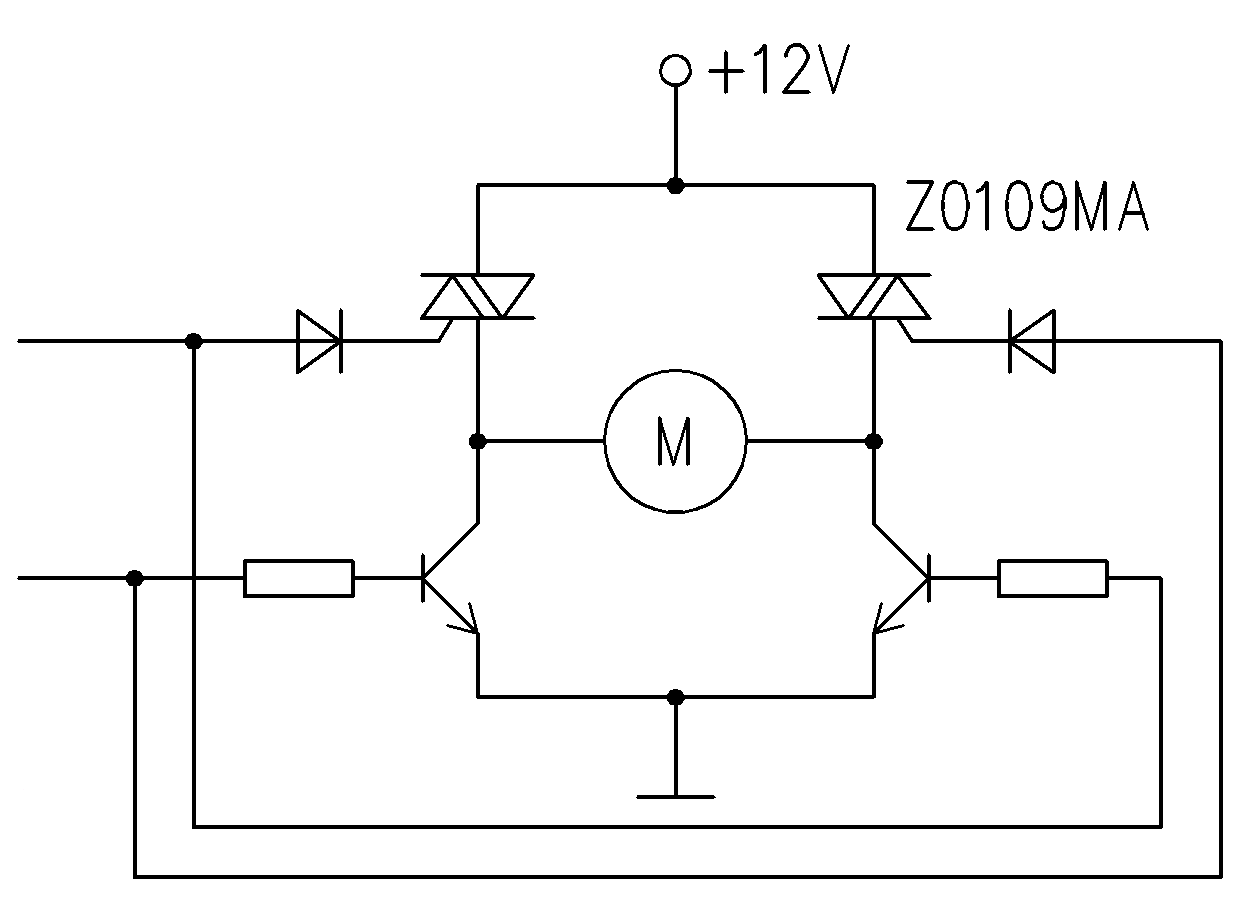
Pøijímaè je pouitý "Wireless Radio Superheterodyne Receiver Module RM1SHS", hádejte odkud. Dekodér je CTA88 od firmy Radiometrix, koupený v ART-Brno. Je to stejný obvod jak pro kodér. Jakou bude mít obvod funkci urèuje zapojení biuterky kolem obvodu. Všechno je v datalistu. Výstupy dekodéru jsou pøipojeny k jednotlivým zaøízením. Pro zapínání, vypínání kamery a AV vysílaèe slouí jednotlaèítkové on/off ovládání. Místo tlaèítka jsem pouil optorelé AQV210. Tranzistor spíná napájení pro kameru a video vysílaè. Pro spínání kontaktù tlaèítka spouštì slouí dvì optorelé AQV210. Zpodìní sepnutí spouštì po ostøení je øešené kondenzátorem s velkou kapacitou, stejnì jako u jednièky. Motory jsou napájené pøes H-mùstky. Trochu jsem s H-mùstkem laboroval. Pøi zapojení ètyø tranzistorù NPN, co mì napadlo jako první, nedostaneme do motoru vìtší napìtí, ne je vstupní napìtí na bázi tranzistorù. Co v mém pøípadì log1 na dekodéru je 5V. Pokud máte 5V motory, staèí to. Pokud máte 12V motory, nestaèí. Zapojení se dvìma NPN a dvìma PNP tranzistory se mì nelíbilo. Pro PNP tranzistory je nutné invertovat výstup z dekodéru, take pøidat další kurvítko. Ani google nepomohl. Po pár dnech jsem na to pøišel. Triak! Spodní tranzistory jsou NPN. To je v poøádku, motor je zapojený mezi napájení a kolektor. Pozdìji jsem NPN tranzistor nahradil mosfet tranzistorem N-kanál. Ten snese vìtší proud. Horní tranzistory jsem nahradil triaky. Pøi log1 dekodéru triak sepne. Pøi log0 se sice nerozepne, ale rozepne se spodní tranzistor. Tím pøestane obvodem protékat proud a triak se rozepne. Je to strašnì jednoduché, ale 100% funkèní. Dioda na øídící elektrodì triaku je ochrana proti nerozepnutí tranzistoru. Pøi sepnutí triaku protéká proud z napájení pøes hlavní elektrodu do øídící elektrody. To znamená, e by tekl proud i na bázi tranzistoru, ten by byl stále sepnutý. H-mùstek, 4x
NPN tranzistor
H-mùstek, 2x
triak, 2x
NPN tranzistor
Rozmístìní souèástek pøijímaèe 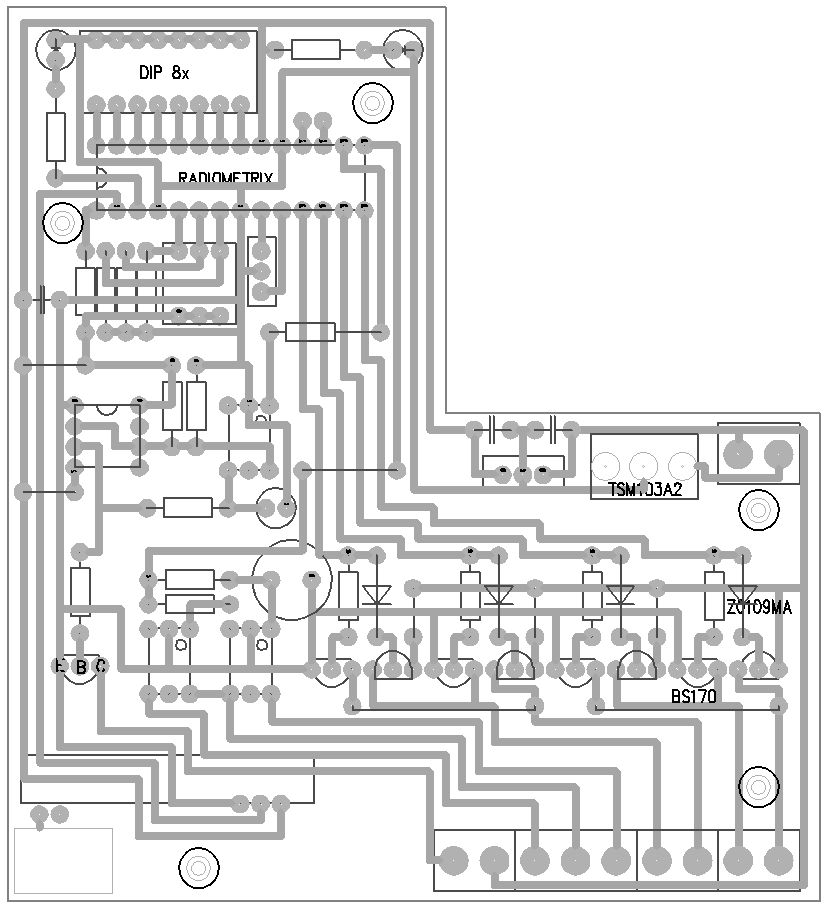
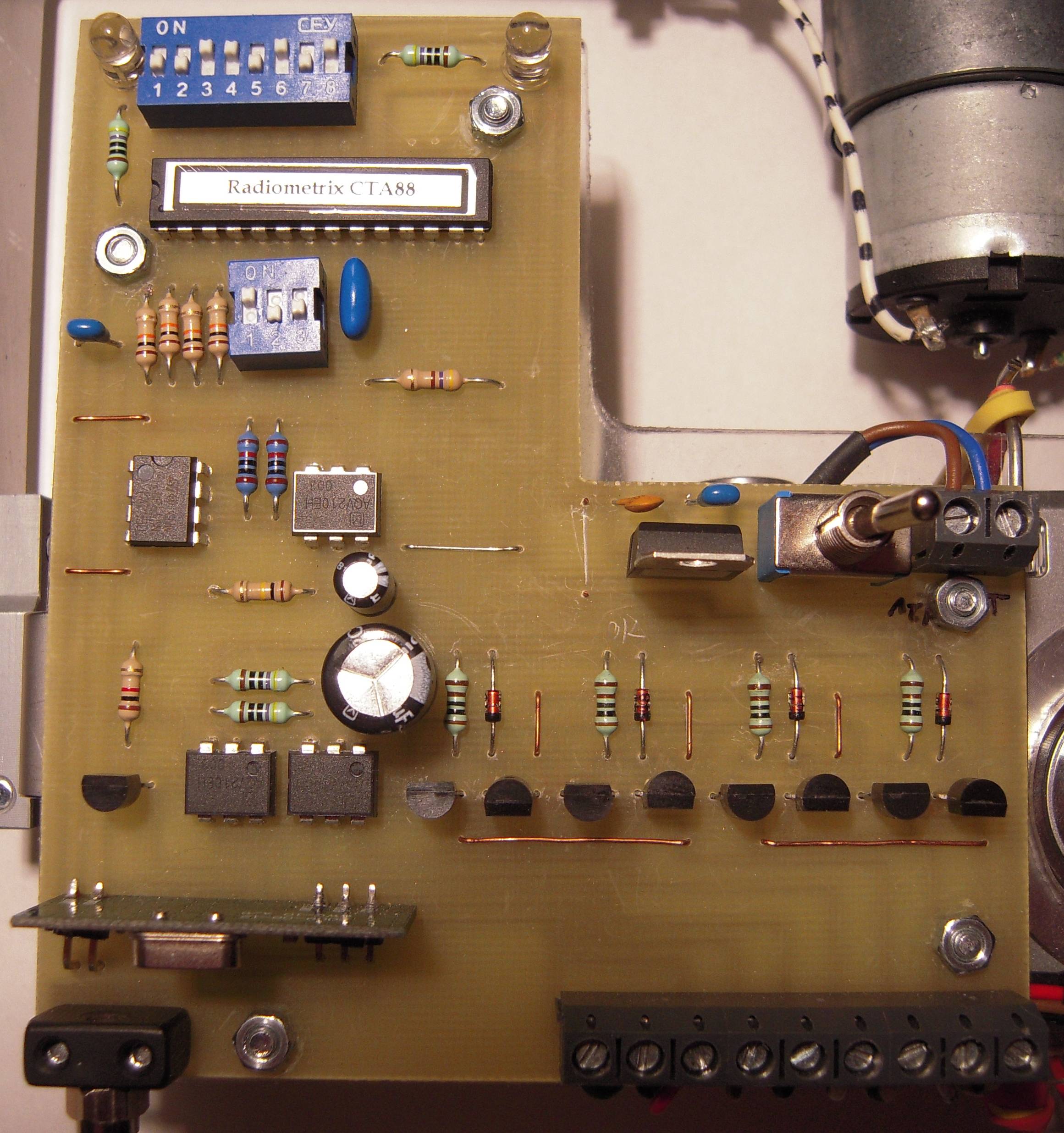
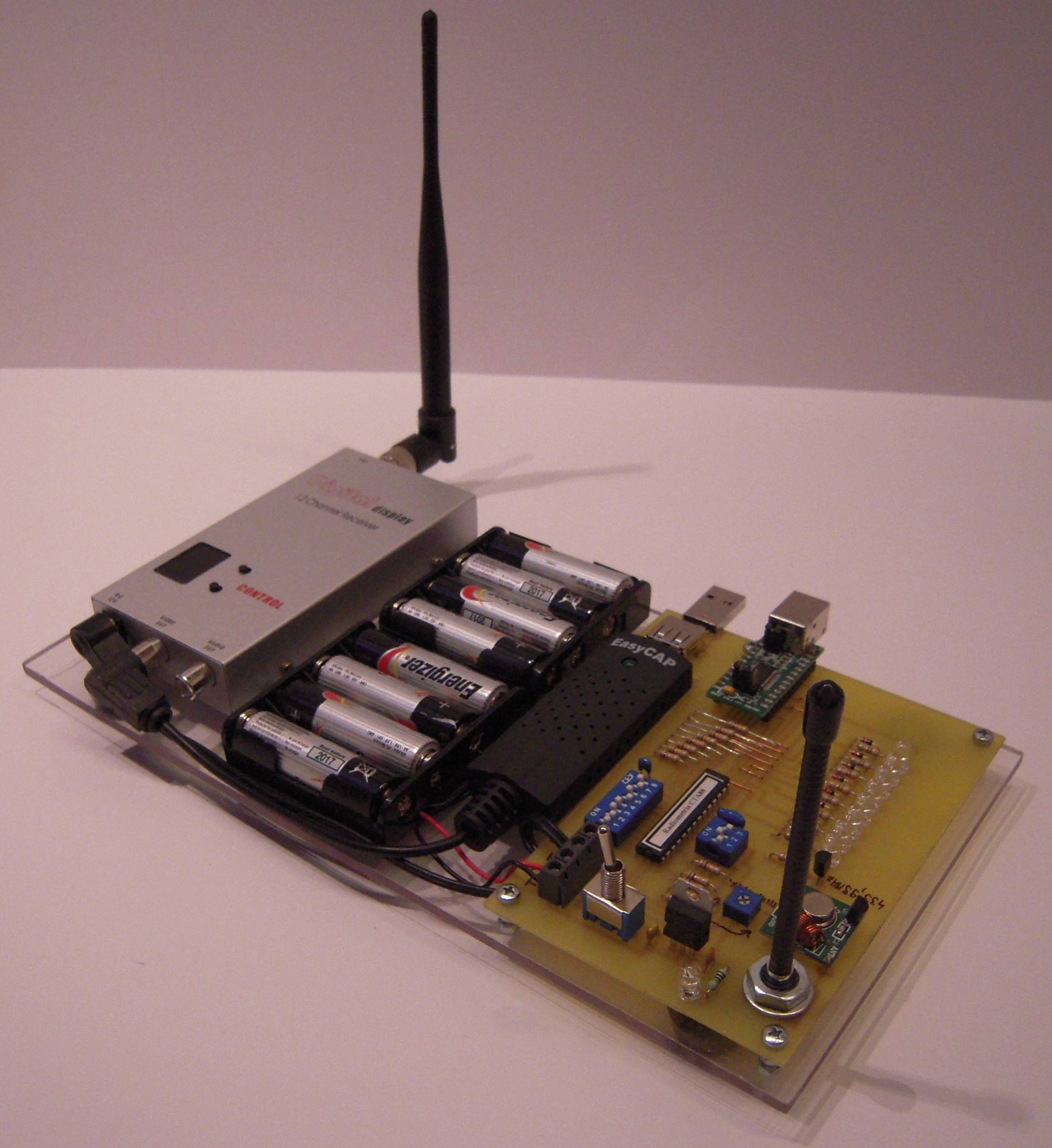
Nejdøív jsem vše osadil na zkušební desku. Takto vypadá kompletní KAP souprava II |